
Project of MOF(Ministry of Oceans and Fisheries)
| Item | Contents | |
|---|---|---|
| Project name | Development of Autonomous Navigation System with Intelligent Route Planning Function | |
| Total period/current year | 2020.04 ~ 2025.12 ( 5years 9months ) / April 2020 ~ December 2020 | |
| Technical Overview for development |
|
|
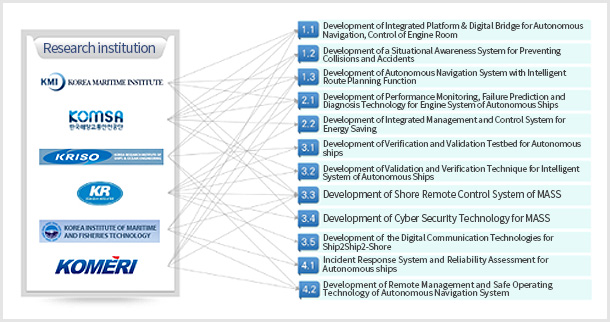
| Contents of Research by Institution |
|
|
[Composition of Autonomous Navigation System ]
Product(Prototype)
- Route Planning SW for Operational Safety(Collision Avoidance of more than 3 ships, all routes)
- Path Planning SW for Economic Operations(Reduced fuel consumption by more than 5% on average, with an optimal operational prediction error rate of less than 10%)
- High Reliability Route Tracking Control SW(15 stopover points, follow at least 2 pass conditions, Rudder/Engine control)
- Common High Performance Service Platform for Autonomous and Economic Operations[(HW)+(SW)]
[Automatic Berthing SW concept]
Document(Rules, Manual, etc.)&Technology
- Development of Precision Operations Model for the Development of Autonomous Navigation Algorithms
(within 10% of the standard value of state error) - Automatic Berthing SW basic design (Control error position precision less than 1.0 m and azimuth precision less than 0.5 deg.)
Project of MOF(Ministry of Oceans and Fisheries)
| Item | Contents | |
|---|---|---|
| Project name | Development of the next Digital Communication Technologies for Ship2Ship2Shore | |
| Total period/current year | January 2021 ~ December 2025( 5 years ) / January 2021 ~ December 2021 | |
| Technical Overview for development |
|
|
| Contents of Research by Institution |
|
|
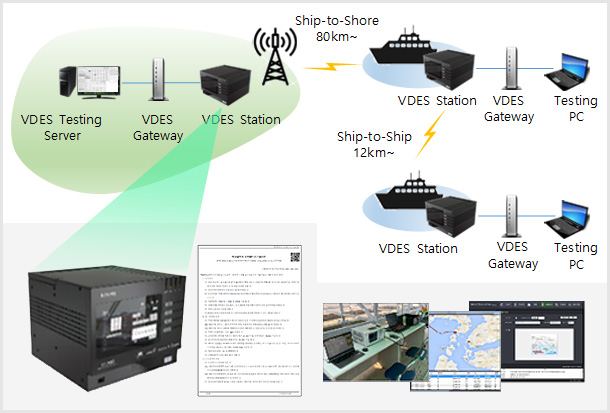
[VDES Ship station communication system]
VDES Ship Station Communication System and gateway(prototype)
- Development of Digital Communication System for Maritime International Standards(ITU-R M.2092)
- Securing coverage and communication speed suitable for exchanging core information on autonomous ship (Ship to Ship: More than 12 km, Ship to Land: More than 80 km, Maximum 307 kbps@VDE)
- Supports stable digital communication links (20% PER@-107 dBm, VDEBW)
- IP Packet Service via VDES Gateway (VDES Gateway Prototype)
- International Standardization Related to VDES and the enactment/revision of domestic maritime wireless equipment standards
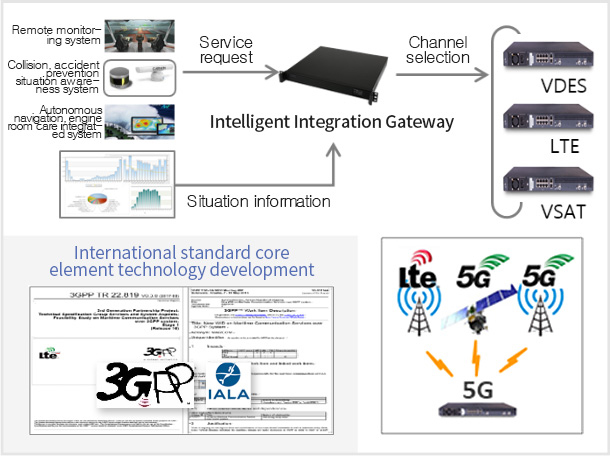
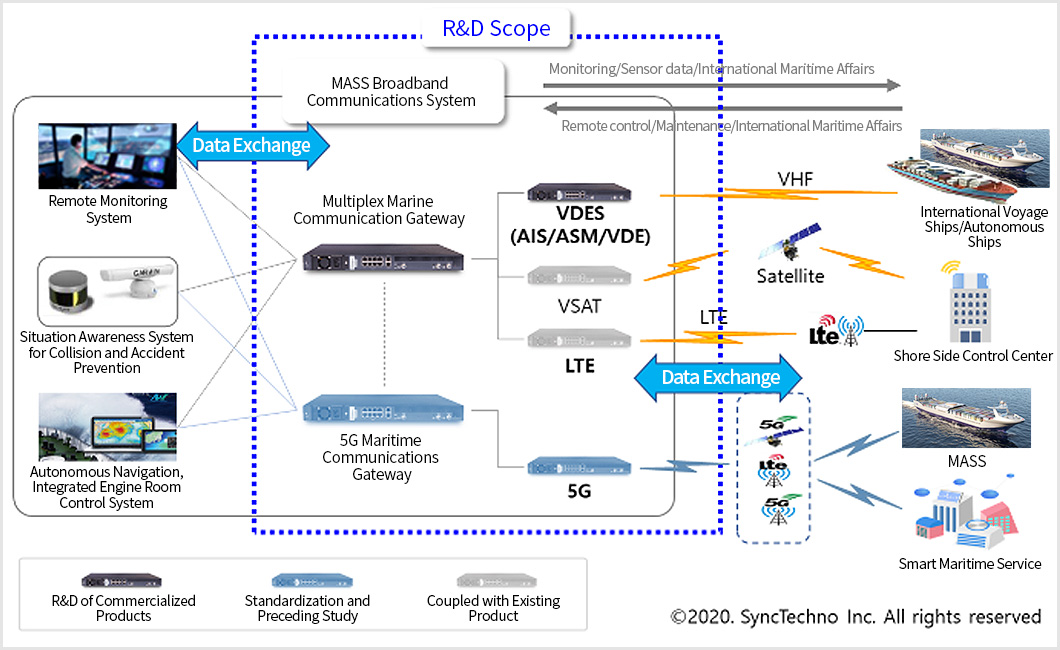
[ Integrated gateway for Maritime Wideband Communication]
Maritime Broadband Integrated Gateway (Prototype)
- Maritime broadband integrated gateway with diverse means of communication (VDES, VSAT, LTE)
- Selection of intelligent channels according to ship operation status information (type of service, communication quality, etc.)
- Development of Marine Wideband Communication Equipment for LTE-Based Broadband Service (Downlink more than 3Mbps, Uplink more than 1Mbps)
- Advanced R&D of key element technology related to gateway 5G and Beyond
- Development of requirements and standard technology for 5G core element technology
Project of MOF(Ministry of Oceans and Fisheries)
| Item | Contents | |
|---|---|---|
| Project name | Development of Cyber Security Technology for MASS | |
| Total period/current year | January 2021 ~ December 2024( 4 years) / January 2021 ~ December 2021 | |
| Technical Overview for development |
|
|
| Contents of Research by Institution |
|
|

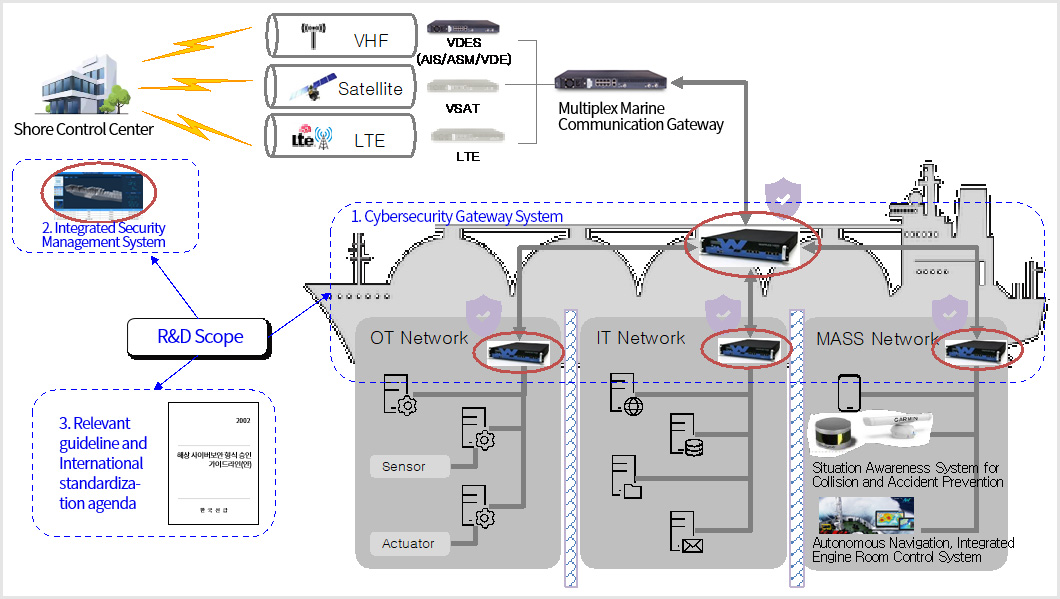
[Image of related product(prototype)]
Product(Prototype)
- Cybersecurity Gateway
- Integrated Security Management System
[Image of Related Document & Technology]
Document(Rules, Manual, etc.)&Technology
- Guidelines for Cybersecurity formal Approval of MASS(2 types)
- Agendas for cybersecurity technology standards of MASS
Project of MOF(Ministry of Oceans and Fisheries)
| Item | Contents | |
|---|---|---|
| Project name | Development of Shore Remote Control System of MASS | |
| Total period/current year | April 2020 ~ December 2024( 4 years 9 months ) / April 2020~ December 2020 | |
| Technical Overview for development |

|
|
| Contents of Research by Institution |
|
|

[Image of related product(prototype)]
Product(Prototype)
- MASS Remote Control System
Document(Rules, Manual, etc.)&Technology
- A manual of emergency situation scenario operation for MASS
- Building scenarios against emergency
(3 class services, 99.0% service satisfaction) - Remote monitoring system
(99.0% or higher of remote operator’s satisfaction) - Remote control system
(99.9% success rate of remote control by emergency situation) - Model evaluation report of situation recognition system for remote operations
(Model evaluation based on IMO ergonomics design guidelines)
Project of MOF(Ministry of Oceans and Fisheries)
| Item | Contents | |
|---|---|---|
| Project name | Incident Response System and Reliability Assessment for Autonomous ships | |
| Total period/current year | January 2021 ~ December 2025 ( 5 years ) / Not applicable | |
| Technical Overview for development |
|
|
| Contents of Research by Institution |
|
|
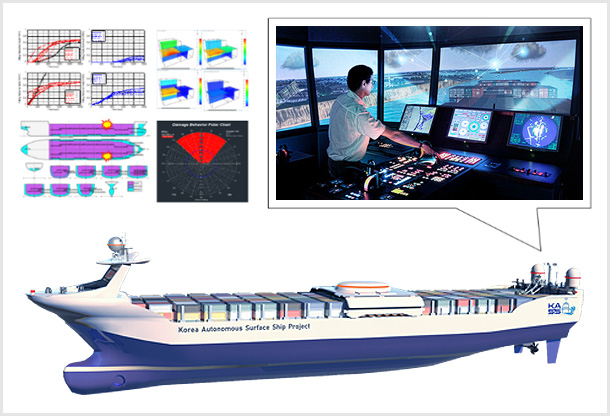
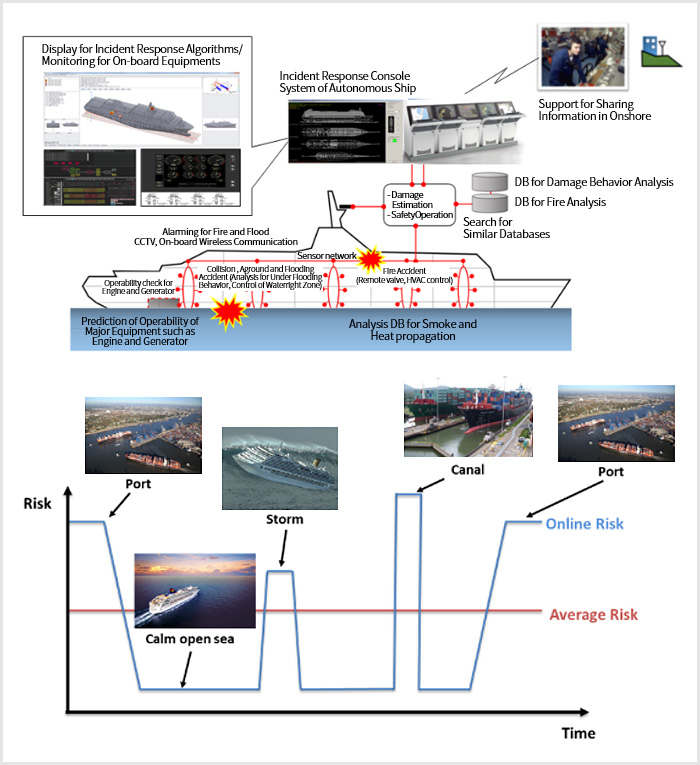
[Image of related product]
Product(Prototype)
- System console for autonomous navigation accident response (5 or more kinds of information sharing of shore control center)
- Signaling interworking of accident detection system (more than 5 types of sensor linkage and 8 types of control interlocking)
- Incident response system scenario (at least 2 types of scenario, at least 1 target vessel)
- Risk model of MASS
- FSA (basic design FSA) for MASS
- Collision scenario customized simulator (1 Software)
- Real-time risk analysis software for MASS (1 software)
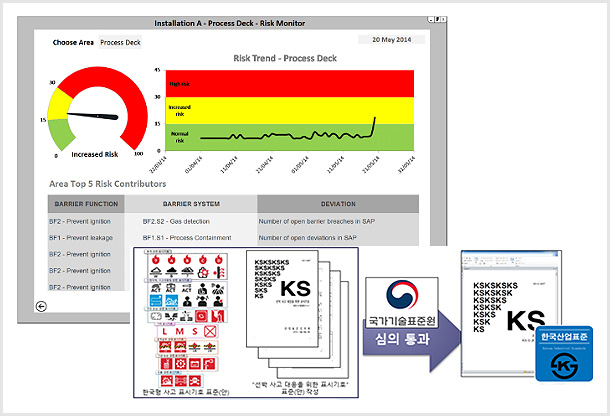
[Image of related document and technology]
Document(Rules, Manual, etc.)&Technology
- Specification of autonomous shipboard accident response system
- Establishment of information database for ship model operating of accident response system
- KS standard for autonomous ship accident response system
- ISO standard for autonomous ship accident response system (proposal)
- Guideline for the risk and evaluating reliability of self-driving ships (1 case of evaluation guide)
- Basic design of FSA for MASS(1 case of FSA report)
- Intellectual property rights related to accident response systems and risk assessment technologies (7 cases of applications and 1 case of registration)
Project of MOF(Ministry of Oceans and Fisheries)
| Item | Contents | |
|---|---|---|
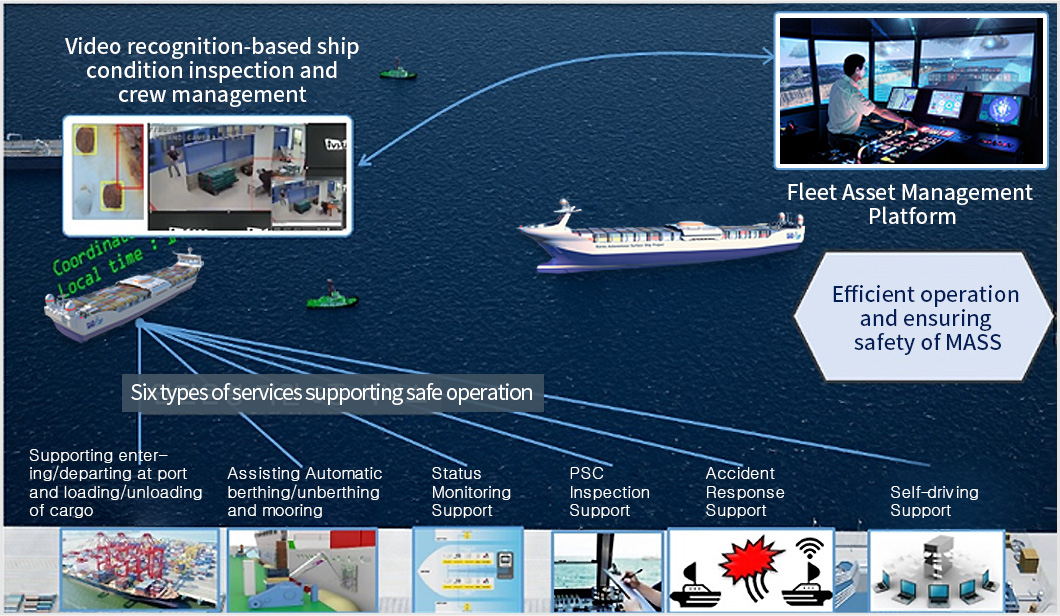
| Project name | Development of Remote Management and Safe Operating Technology of Autonomous Navigation System | |
| Total period/current year | April 2020 ~ December 2024 ( 4 years 9 months ) / April 2020 ~ December 2020 | |
| Technical Overview for development |
|
|
| Contents of Research by Institution |
|
|

[Assisting service for berthing(example)]
Product(Prototype)
- Support services for autonomous navigation (collision avoidance in three or more ships, 80% or more of service satisfaction)
- Berthing and mooring support services (reduced accident rate by 10% or more)
- Assisting services for loading and unloading of freight and arrival/departure at port (error rate less than 10%)
- PSC inspection support service (provision of PSC faults checklist)
- Engine status monitoring support services (reduced maintenance costs by more than 5%)
- Image recognition-based status inspection SW (damage recognition rate of 90% or higher)
- Fleet asset management platform (one software case)
[Image of Related Document & Technology]
Document(Rules, Manual, etc.)&Technology
- Establishment of a database related to ship damage and assets
- Establishment of infrastructures for ground demonstration operation
- Development of guidelines for ship management and inspection
Project of MOF(Ministry of Oceans and Fisheries)
| Item | Contents | |
|---|---|---|
| Project name | Development of International Standardization Technology for Autonomous Ships | |
| Total period/current year | April 2020 ~ December 2025 ( 5 years 9 months ) / April 2020 ~ December 2020 | |
| Technical Overview for development |
|
|
| Contents of Research by Institution |
|
|
Development of Standardization Agenda
- Development of IMO Agenda Document (Adoption 6 cases, Submission 18 cases)
- Development of ISO Agenda Document (Adoption 1 case, Submission 5 cases)
- Development of IEC Agenda Document (Adoption 1 case, Submission 5 cases)

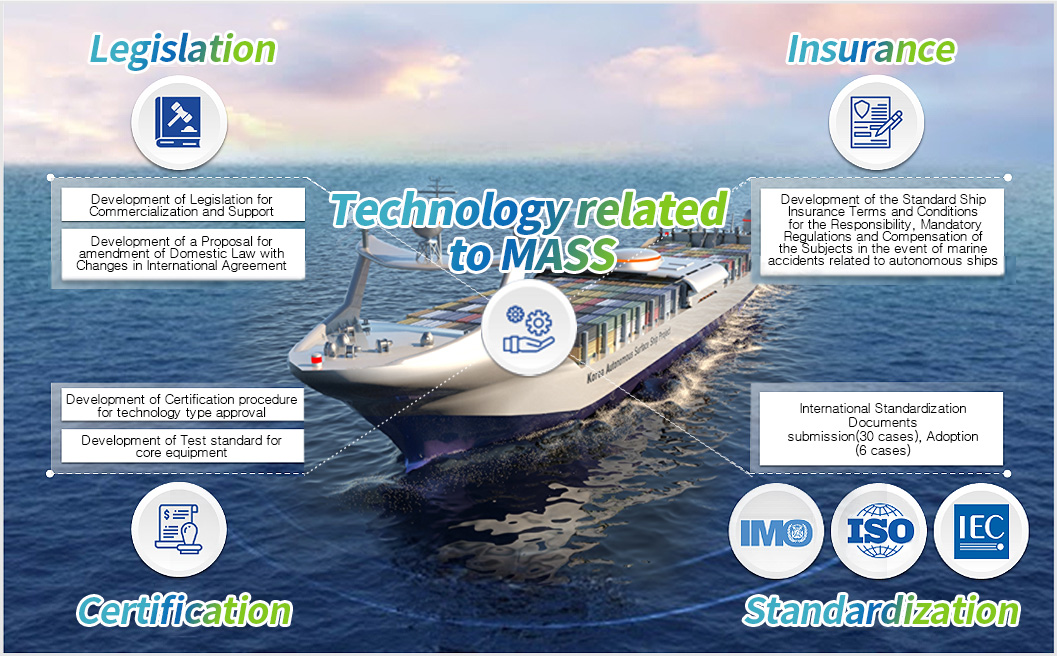
Developing Guidelines for Certification and Enactment/Amendments
- Development of legislation(proposal) of MASS
- Development of Guidelines for Remote Operations
- Development of Standard Terms and Conditions for Liability Insurance
- Development of Amendment(proposal) of MASS
- Development of Guideline(proposal) for certification of MASS>
Composing and operating of responsible organization dedicated to international standardization of autonomous ships
- Compose and operate an organization in exclusive charge of IMO, IEC, and ISO standardization
- Operate committees for the development of links with other projects and the sharing of achievements in the project
Project of MTIE(Ministry of Trade Industry and Energy)
| Item | Contents | |
|---|---|---|
| Supervising institution and participating institution | KRISO, KAIST, STR, SEADRONIX | |
| Research Period | 1st Phase: April 2020 ~ December 2022 2nd Phase: January 2023 ~ December 2024 ( 4 years 9 months) |
|
| Technical Overview for development |
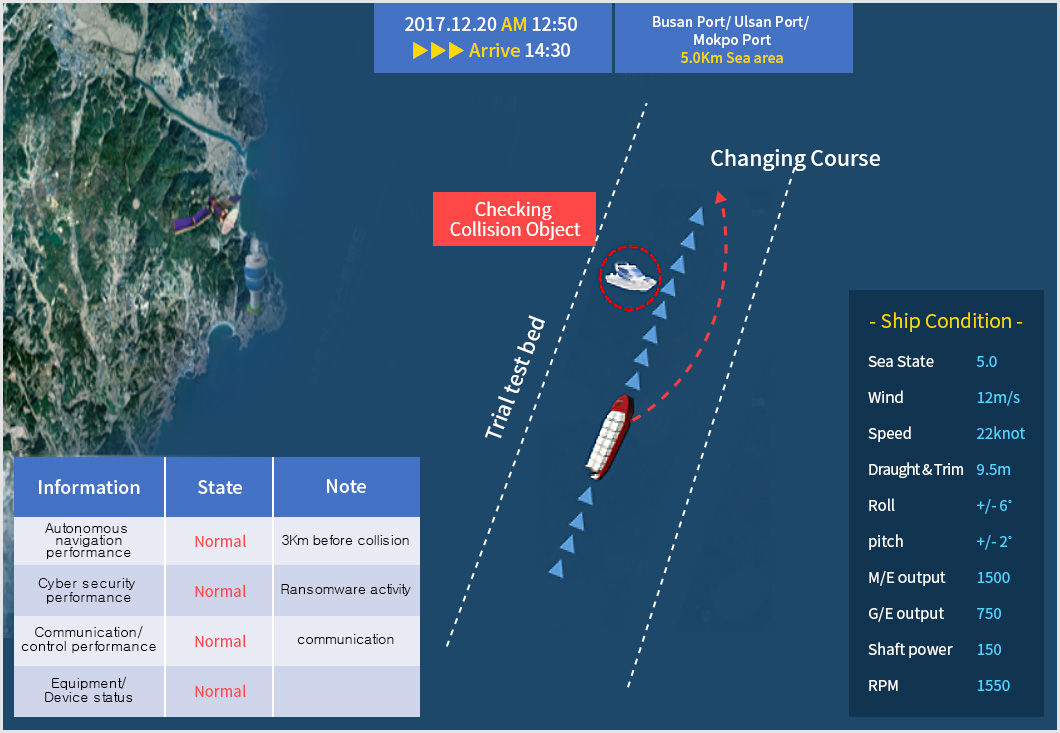
Situational Awareness System for Preventing Collisions and Accidents
|
|
| Contents of Research by Institution |
|
|
| Final goal of system and developed technology | Development Target | |
|---|---|---|
| 1. Integration/Processing/Management System for Heterogeneous Sensor | Development of Systems for MASS demonstration | TRL 7 |
| 1) Securing heterogeneous sensor data | Obtaining testbed/small ship/demonstration ship data (>100 cases) | 100 case |
| 2) Performance for Marine Object Detection and Identification | Relative distance ≤100m / Rubber boat (2m) | 99 % |
| Relative distance ≤1km / Fishing boat (10m) | 99 % | |
| Relative distance ≤5km/ Small vessel (20m) | 90 % | |
| Relative distance ≤10km/ Merchant ship (150m) | 85 % | |
| Vessel type classification (five or more types of major sailing ships) |
90 % | |
| Feature Display Classification(two or more types) | 85 % | |
| 2. Information Matching and Output System for Situation Awareness | Development of Systems for MASS demonstration | TRL 7 |
| 1) update interval of Status information | AR(Augmented Reality)/Implementing 3D functional visualizations | 1 Hz |
| 2) Estimation Error of Motion Information | Standard deviation criterion of estimated information | ≤ ±1σ ((Standard deviation)) |
| 3) Securing a collision risk assessment model | Probability model (comparison of existing representative models | 100 % |
| 3. Simulator system for assisting generation of AI- based learning information and verification | Development of a Simulator System for Verification of Development Algorithms | TRL 7 |
| 1) Generation of Simulator-Based Learning Data | Changed more than five variables (object type, time zone, weather, wind, algae, relative velocity, etc.) | 100 % |
| 2) Implementation of Simulator DB assisting verification | Designing Object 2D/3D model and constructing sensor specific model DB | 100 % |
| 4. Quantitative research outcome | Publication, application, registration of papers | - |
| SCI papers, domestic journals, patents (application/registration) | 5cases/8 cases/Application:4 cases, Registration: 4 cases | |
Project of MTIE(Ministry of Trade Industry and Energy)
| Item | Contents | |
|---|---|---|
| Supervising institution and participating institution | KR, DMSE, HMM OCEAN SERVICE, POSSM, Lab021, KL-Net, KIMM, KRISO, INHA University, MNMU, AJOU University, INNOSIMULATION, CCLSOFT | |
| Research Period | 1st Phase: April 2020 ~ December 2022 2nd Phase: January 2023 ~ December 2025( 5 years 9months ) |
|
| Technical Overview for development |
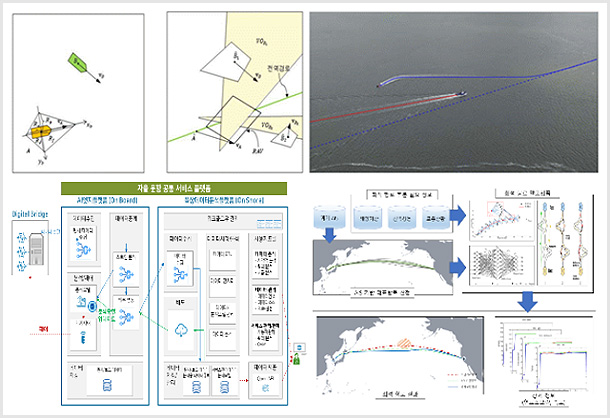
Technology concept to be developed
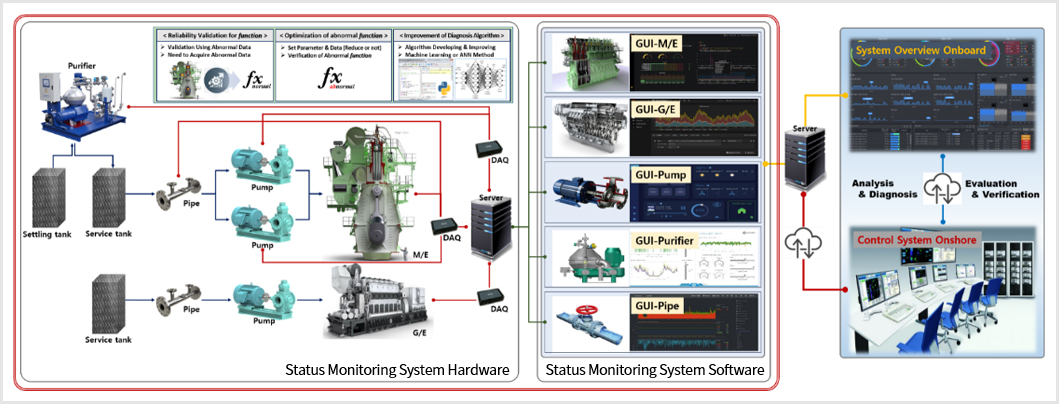
[Target Technique Ⅰ] State-based fault diagnosis/predicting techniques(Condition based Maintenance)
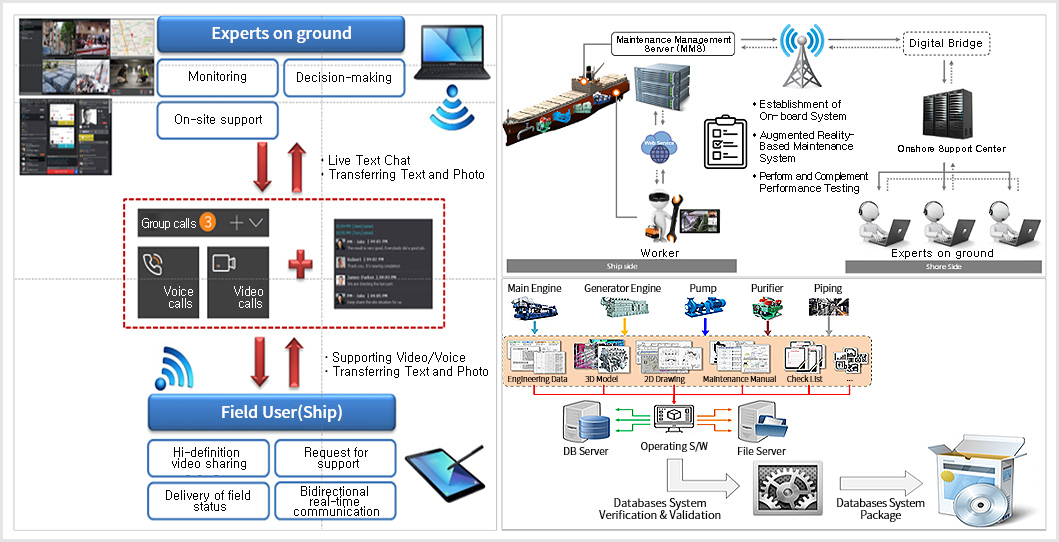
[Target Technique Ⅱ] Augmented Reality-Based Intelligent Ship Remote Maintenance Support System (Fail-safety)
|
|
Project of MTIE(Ministry of Trade Industry and Energy)
| Technology to be developed Ⅰ | Integrated System for State-based Fault diagnosis / Prediction (Condition based Maintenance) | |
|---|---|---|
| Technical Goal |
|
|
| Research Period |
|
|
| Technical Composition Diagram |
|
|
| Technology to be developed Ⅱ | Augmented Reality-Based Intelligent Support System for Remote Maintenance (Fail-Safety) | |
|---|---|---|
| Technical Goal |
|
|
| Technical Configuration |
|
|
| Technical Composition Diagram |
|
|
Project of MTIE(Ministry of Trade Industry and Energy)
| Item | Contents | |
|---|---|---|
| Supervising institution and participating institution | KRISO, ETRI, KR | |
| Research Period | 1st Phase: April 2020 ~ December 2022 / 2nd Phase: January 2023 ~ December 2024 (4 years 9 months) |
|
| Technical Overview for development |
|
|
Project of MTIE(Ministry of Trade Industry and Energy)
| Item | Contents | |
|---|---|---|
| Supervising institution and participating institution | KRISO, SafeTechResearch, XINNOS, Lloyd’s Register Asia branch, KMOU, KSOE, Samsung Heavy Industries | |
| Research Period | 1st Phase: April 2020 ~ December 2022 / 2nd Phase: January 2023 ~ December 2024( 4 years 9 months) |
|
| Technical Overview for development |
|
|
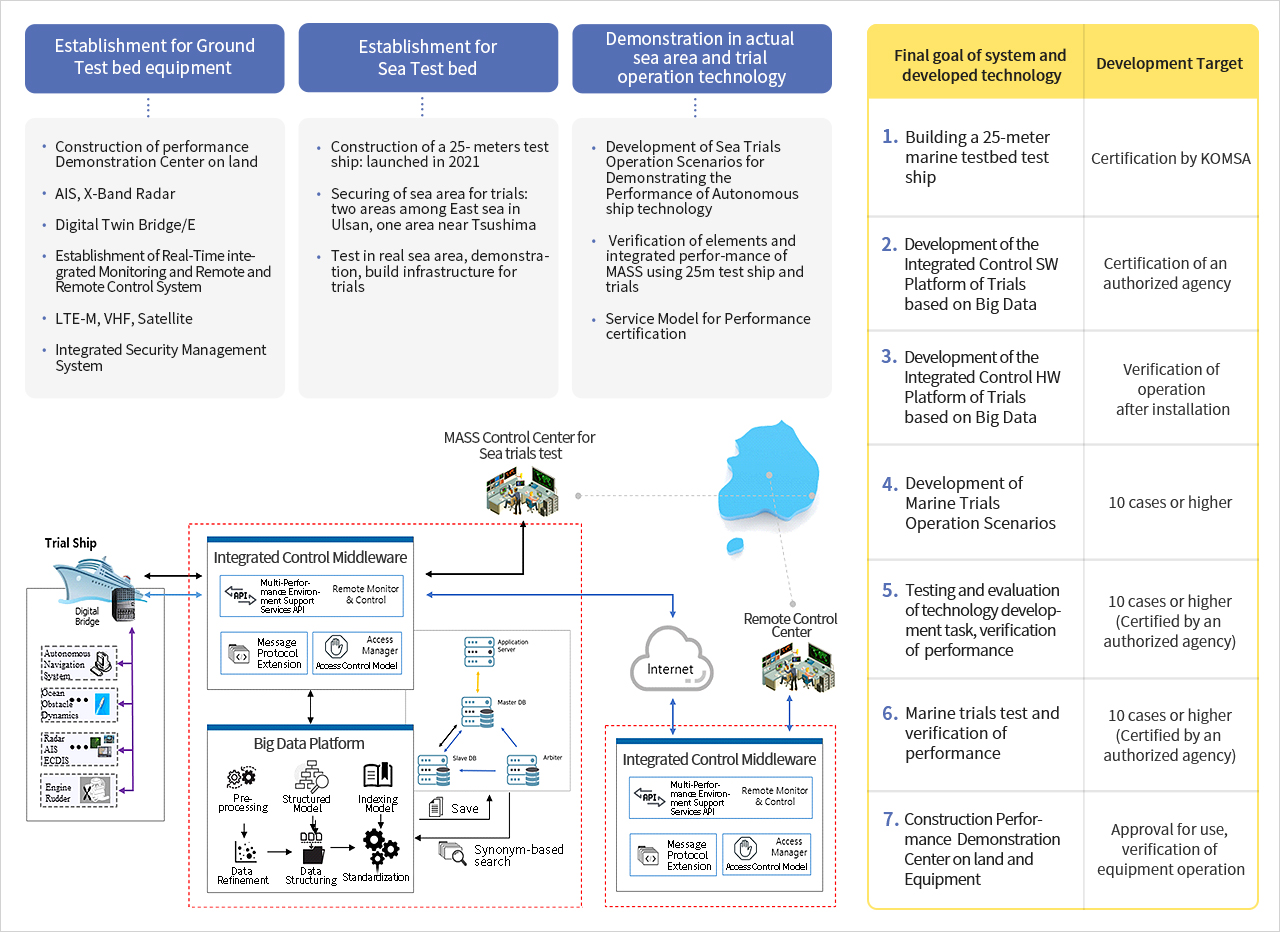
| Final goal of system and developed technology | Development Target |
|---|---|
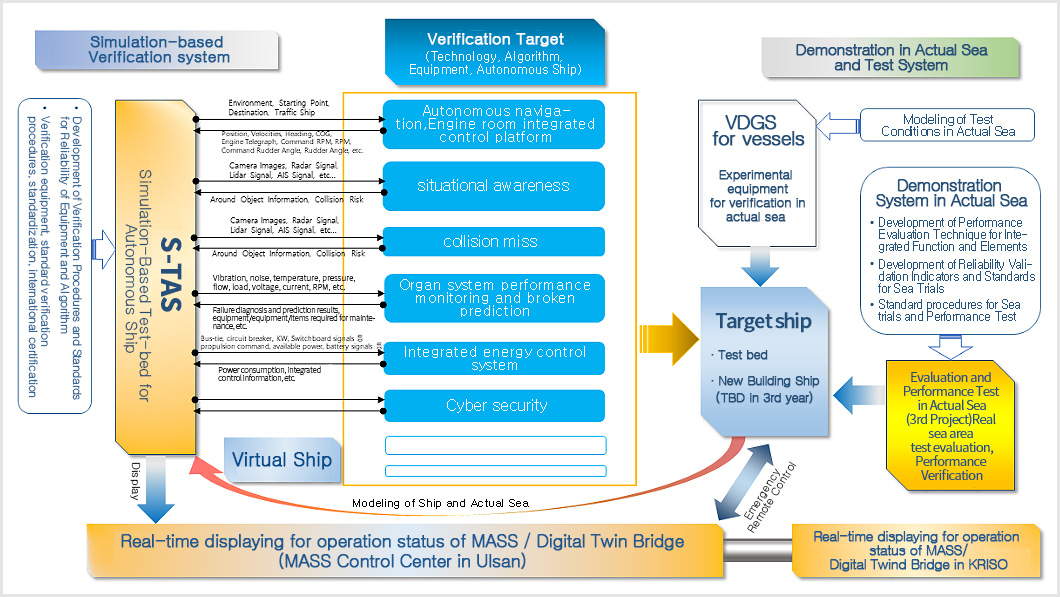
| 1. Development of a system for Simulation-based Test-bed for Autonomous Ship (S-TAS) | System: KR Certification Model: Third party Certification |
| 1) Building an S-TAS Sea Area Model | 3 sea areas |
| 2) Building an S-TAS Ship Model | 10 vessels |
| 2. Development of a real-time monitoring system for testing in actual sea area of autonomous ships | Third party Certification |
| 1) Digital Twin Bridge Monitoring system | Display accuracy of Navigation status : 99% or higher |
| 2) Digital Twin Engine Monitoring System | |
| 3. Development of Test Equipment for Performance Verification in Actual Sea Area of the Autonomous navigation System | KR Certification |
| 1) Virtual Data Generation System | Navigation data, engine data |
| 4. Procedure of performance verification and evaluation sheet of autonomous operation system | Certification of an authorized agency |
| 1) Performance Verification Procedure and Evaluation Sheet for Simulation-based Test-bed for Autonomous Ship Autonomous Operating System | 10 cases |
| 2) Performance Verification Procedures and Evaluation sheet for MASS/systems in the sea area | 10 cases |